Univerza v Ljubljani
Fakulteta za strojnistvo
Laboratorij LECAD
Avtor: Ivan Demsar
Mentor: Roman Zavbi
Seminarska naloga
11.3. PREDNAPETA VIJACNA ZVEZA S PRITRDILNIM VIJAKOM
KAZALO
Computer program constructed in JavaScript language is designed for calculationof prestresed screw joints with DIN 7990 screws. As autput you get dimensions of first appropriate screw, expansion diagram, 2D scheme of a screwjoint and 3D wire model of a screw.
Moj namen izdelave programa za preracun prednapete vijacne zveze je, da spoznam programiranje za internet. V ta nemen sem uporabil HTML programski jezik. Za preracun in izris pa sem uporabil Javascript in graficno knjiznico PHIGS.
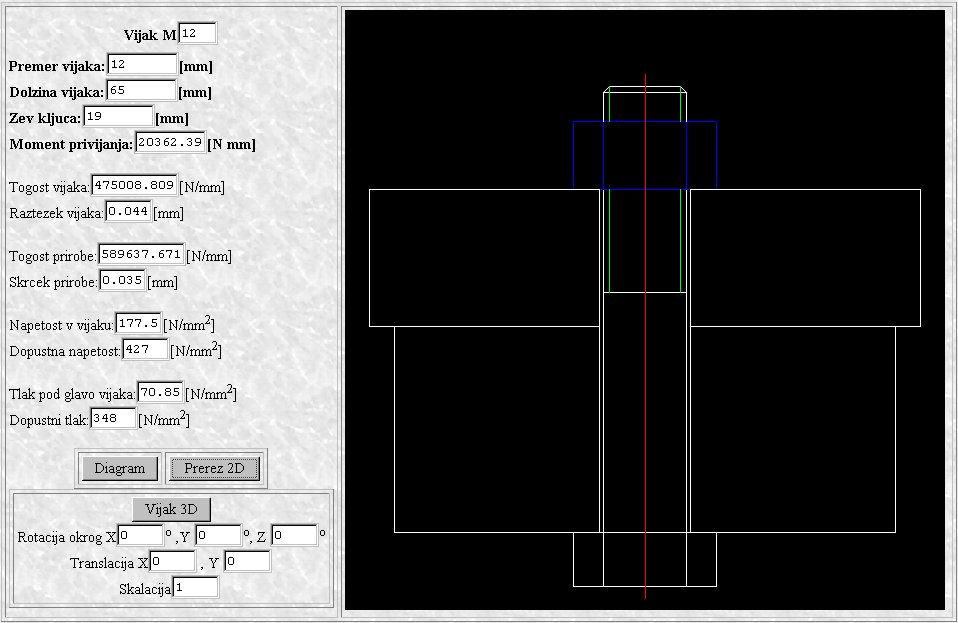
Izdelajte program za preracun prednapete vijacne zveze s pritrdilnim vijakom, ter skica zveze v 2D, ter nekotirana skica izracunanega vijaka v 3D. Program izdelajte s prigramskim jezikom Java ali Javascript (izris s pomocjo PHIGS knjiznice).
Preracun vijacne zveze sem izdelal po postopku, ki smo ga spoznali v drugem letniku pri strojnih elementih. V program vnesemo zahteve, kot so:
- Spenjalna sila
- Tesnilna sila
- Podatke o obeh pirobah in
- kvaliteto vijaka
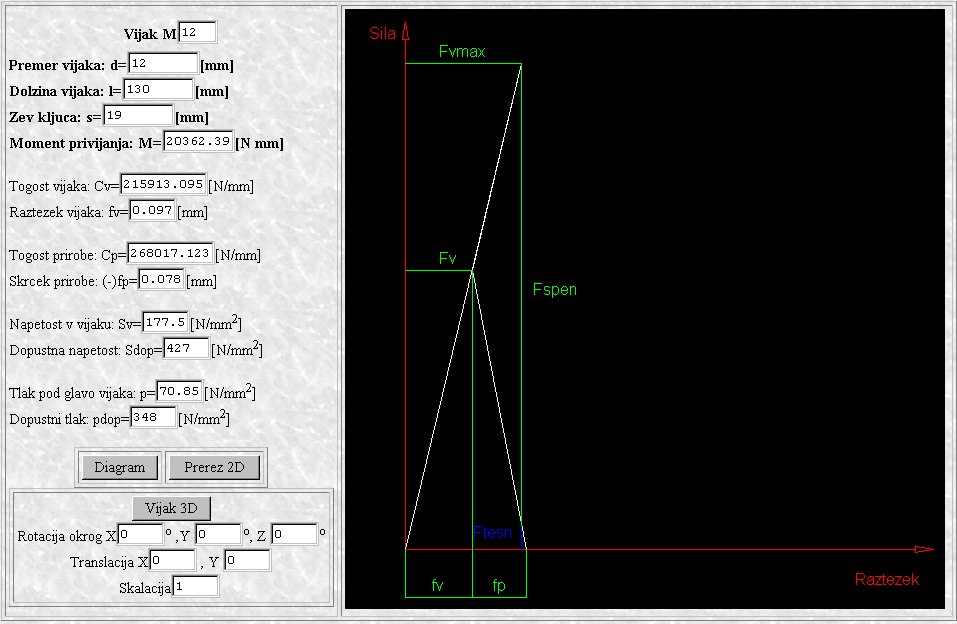
Nato se izracuna maksimalan sila v vijaku po enacbi:
V nadaljevanju se izracuna raztezek vijaka in prirobe po enacbi:
Nato pa se togost vijaka in prirobe:
Sila prednapetja vijak se izracuna po sledeci enacbi:
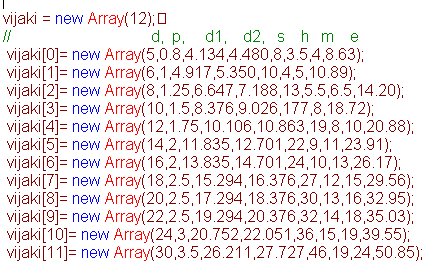
Podatke o vijakih bere iz posebne knjiznice, ki jo vsebuje program. Naslednja slika prikazuje del knjiznice!
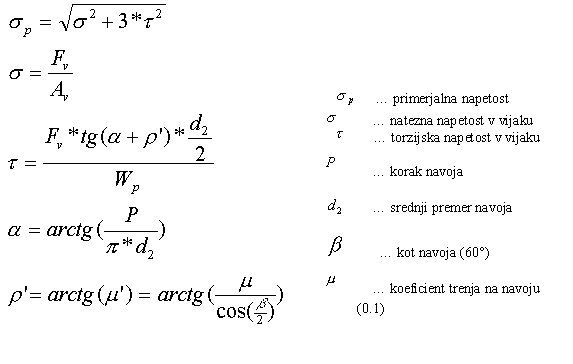
Za vsak vijak se izracuna primerjalna napetost po enacbi:
Izbira vijaka poteka iterativno. Program vzame najmanjsi vijak iz knjiznice in zanj izracuna primerjalno napetost in jo primerja z dopustno napetostjo, ki je podana za posamezna kvalitete vijaka:
| Kvaliteta vijaka
| Dopustna napetost [N/mm2]
|
| 8.8 |
427 |
| 10.9 |
600 |
| 12.9 |
720 |
Na koncu pa se izracuna se s kaksnim momentom moramo priviti matico, da dosezemo zahtevano spenjalno in tesnilno silo:
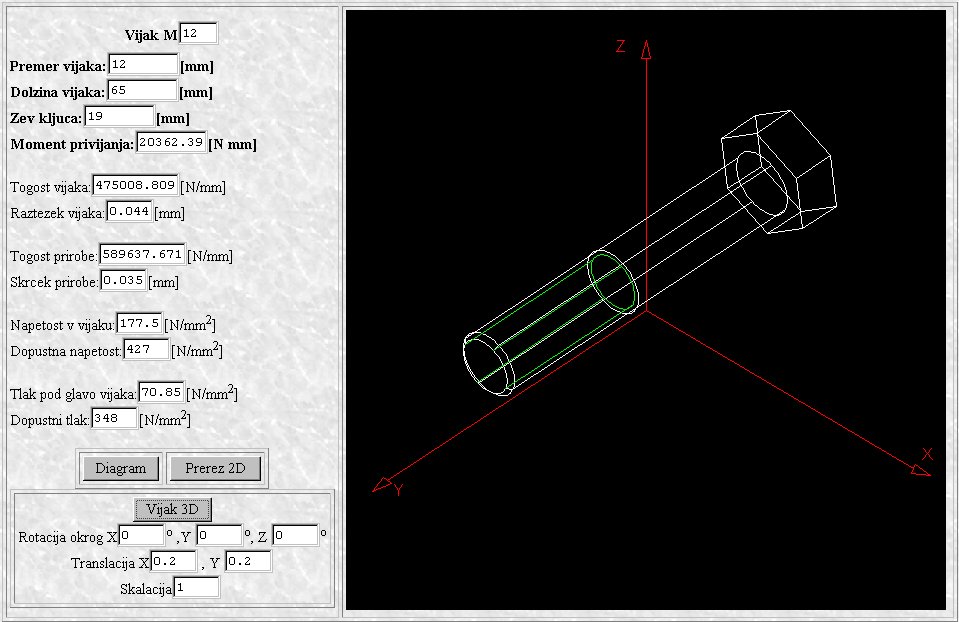
Primer izracuna:
Vhod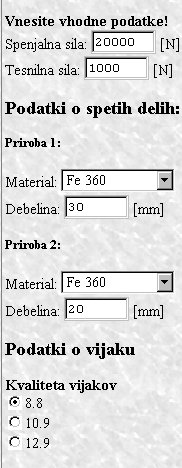 |
Izhod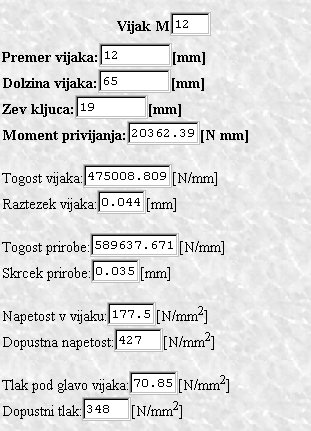 |
- Rotacija tocke v 3D prostoru:
- Skaliranje tocke v 3D prostoru:
- Rotacija tocke v 3D prostoru:
Obicajno se rotacija izvaja okrog dolocene osi. Spodaj predstavljena rotacija je okrog Z-osi. Princip za ostali dve transformaciji je isti le transformacijski matriki se razlikujeta predstavljeni sta v tocki zapis transformacij v homogenih koordinatah (rotacija).
- Translacija:
- Skaliranje:
- Translacija:
a) okoli X osi:
b) okoli Y osi:
c) okoli Z osi:
Program je zgrajen tako, da nam izracunane velicine tudi graficno prikaze:
Pri izdelavi programa sem spoznal teorijo 3D transformacij in z njo povezane transformacijske matrike (translacije, rotacije in skalacije), nacin programiranja v programskem jeziku Javascript ter uporabo graficne knjiznice PHIGS.
Glede nato, da sem prej ze kar nekaj programiral v fortranu, se mi zdi Javascript nekoliko manj razumljiv, vendar za normalnega uporabnika se sprejemljiv "programski jezik".
S samim izracunom nisem imel nikakrsnih vecjih problemov, zapletlo pa se je pri izrisu. Najvecje probleme sem imel pri 3-D izrisu vijaka, ko je potrebno popisati vse transformacije v prostoru (rotacija, skalacija in translacija).
1. Zapiski iz predavanj in vaj
2. Bojan Kraut, Krautov strojniski prirocnik, izdaja: Tehniska zalozba Slovenije, 1994
3. Peter Hribar, Spoznajmo Javascript, izdaja: Flamingo trade, 1998